ORA-3
Description
3d Printable Parts
- 8_1_1 – actuator body
- 8_2_2 – actuator cover
- 8_3_3 – 1:2 Gear
- 8_4_3 – Nema17 Shaft Gear
- 8_5_5 – 1:5 Gear
- 8_6_3 – Main Gear
- 8_7_1 – Main Shaft
- 8_8_1 – Flange
- 8_9_1 – AS5600 Absolute Position Encoder Mount
Non-3d Printable Mechanical Parts
- 6809 Bearing (45x58x7)
- 6002 Bearing (15x32x9)
- MR83ZZ Bearing (3x8x3)
- M4 Threaded Rivets
- M4x35 Screws
- M4x20 Screws
- M3x6 Screws
- M3x35 Screw
- M3x40 Screw
Electronics
- Nema17 Stepper Motor
- AS5600 Absolute Position encoder
Test Environment
- Linux PC
- Arudino Mega
- RAMPS 1.4
- A4988 Stepper Motor Driver
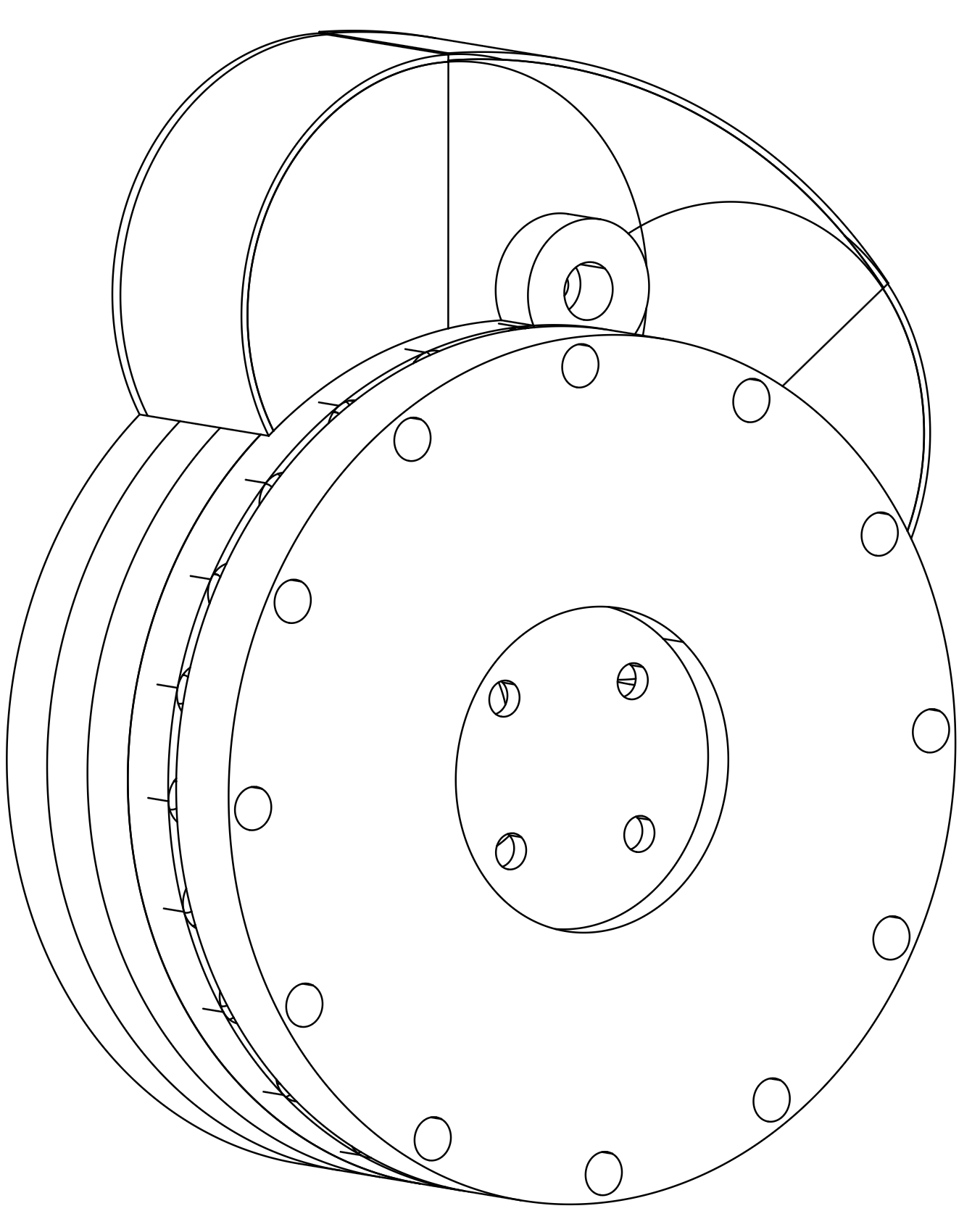
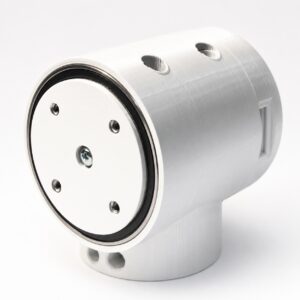
Made for DIY and Prototyping
3d printable Open Robotic Actuator. Designed for DIY and Prototyping purposes. Contains the minimal number of non-3d printed parts. Among the required non-3d printed parts are just bearings, screws and threaded rivets, widely available on any market
Low Precision Requirements
Unlike most of the planetary and cycloidal actuators ORA-3 does not require a high printing precision. All details can be printed with 100% scale and serve as-is without any post-processing except of RAFT/Supports removal.
High-Torque
With 1:80 input/output torque ratio the actuators ensures the torque of 6.5 nm for Nema 17HS4401 stepper motor or 10.5 nm for Nema17HS6001 stepper motor. That is enough to build the robotic manipulator with 500-600 mm reach and 0.5kg of payload.
The load-test video is available in YouTube:
Closed Loop
The actuator is designed to use AS5600 12-bit absolute position Hall Effect encoder, that helps to keep track of the actual position of the actuator. This allows to programmatically compensate the mechanical deformation and backlash, determine when the actuator stucks due to excessive load or train the manipulator by moving it with your hand.
Learn More
See the Documentation section for more information about the assembly.
Reviews
There are no reviews yet.