-
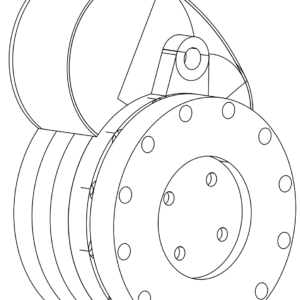
ORA-2 is a compact high-torque 3D printable robotic actuator designed for DIY robotics and rapid prototyping. Built with minimal non-printed parts, it combines a 48.9:1 gear reduction, closed-loop AS5600 absolute encoder feedback, and NEMA17 compatibility to deliver reliable performance for robotic arms, manipulators, and automation projects. Optimized for easy printing with low precision requirements, ORA-2 can be assembled using standard bearings, screws, and inserts available worldwide.
-
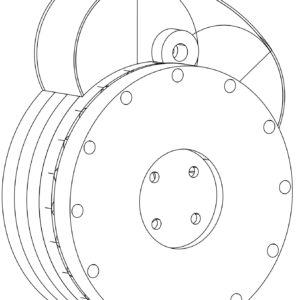
3d Printable Parts 8_1_1 – actuator body 8_2_2 – actuator cover 8_3_3 – 1:2 Gear 8_4_3 – Nema17 Shaft Gear 8_5_5 – 1:5 Gear 8_6_3 – Main Gear 8_7_1 – Main Shaft 8_8_1 – Flange 8_9_1 – AS5600 Absolute Position Encoder Mount Non-3d Printable Mechanical Parts 6809 Bearing (45x58x7) 6002 Bearing (15x32x9) MR83ZZ Bearing (3x8x3)…
-
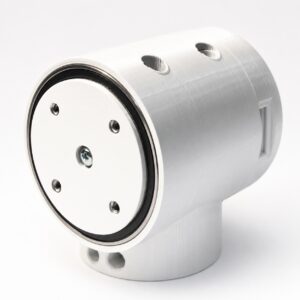
ORA-7 is a compact modular robotic actuator designed for distributed robotic systems and advanced motion control applications. It delivers up to 4.0 Nm of peak torque with positioning precision of ±1°, making it ideal for robotic arms, modular robots, and automation projects. The actuator supports daisy-chain ring topology for easy integration into scalable multi-node robotic systems.