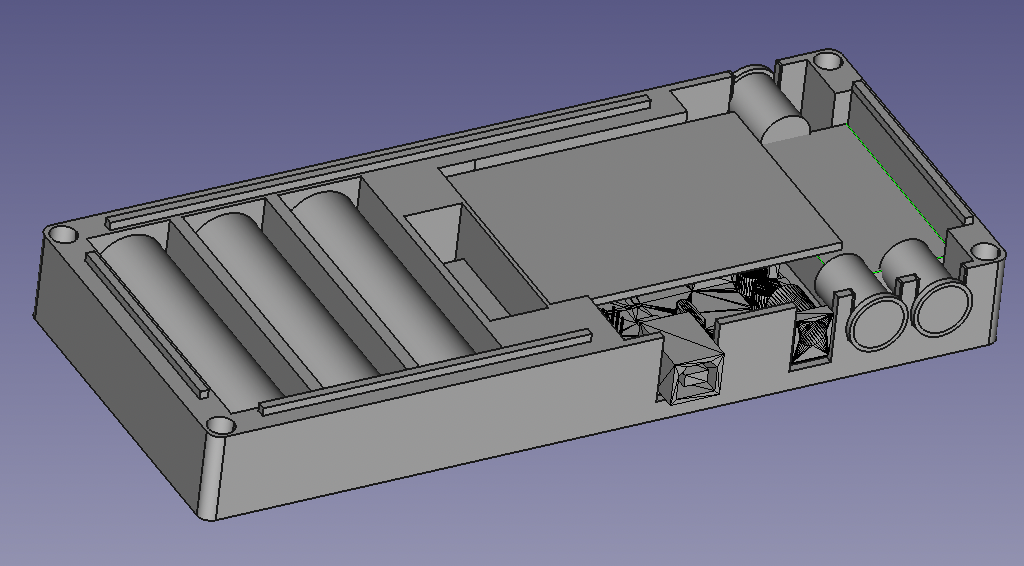
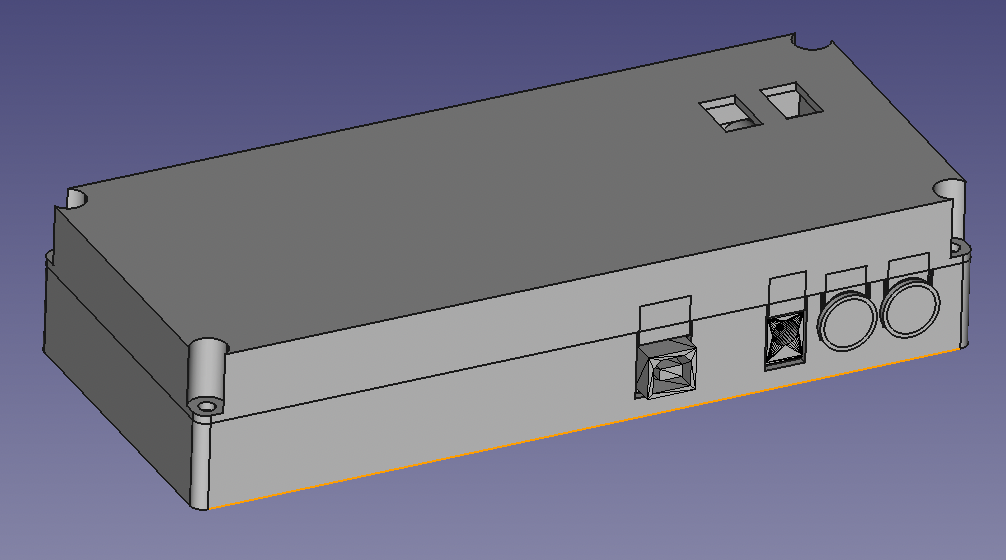
OBP-1

Made for DIY and Prototyping
OBP-1 is a universal power source that suites well for robotic applications, R&D and DIY projects. Unlike most of the power banks it has the high-current output to power-up the DC motors, and the stablisied output to power the computational and control schemes.
OBP-1 allows to be charged while still supplying the output voltage, that helps to create the hardware solutions that needs to stay powered while the charging is performed, like robots, laptops, solar-powered sensors etc.
Software Interface
The battery pack has Serial over USB interface, allowing to check the charging status right from the application. This is especially important for Robotic applications which may need to take some actions to charge or preserve the battery capacity when the charge level is low. The interface supports Open Serial Peripheral protocol, and can be reached with any systel library supporting the serial port communication. The following convenience libraries for the following languages are available:
- Python3
Open Source
All components of the project, including the firmware, software libraries, PCB schematics and body design are open-source. The source code along with the assembly instructions can be found in the public github repository.
 sergei-nntu
sergei-nntuOpen Architecture
Algorithms and operation principles are documented and available for download:
Characteristics
| Capacity | 3000 mAh; 34.2 Wh |
|---|---|
| Cell Type | Li-Ion (3 x 18650) |
| Output Voltage | DC: 11.4V ~ 10A; DC: 11.4V .. 48V ~ 2A (Configurable) |
| Input Voltage | DC: 12.5V ~ 5A |
| Interface | USB 2.0 Serial Interface. Open Serial Peripheral Protocol |
| Size | 192 x 81 x 39 mm |
| Weight | 397 g |